
Поиск точки излома в данных
Published in Journal 1, 2015
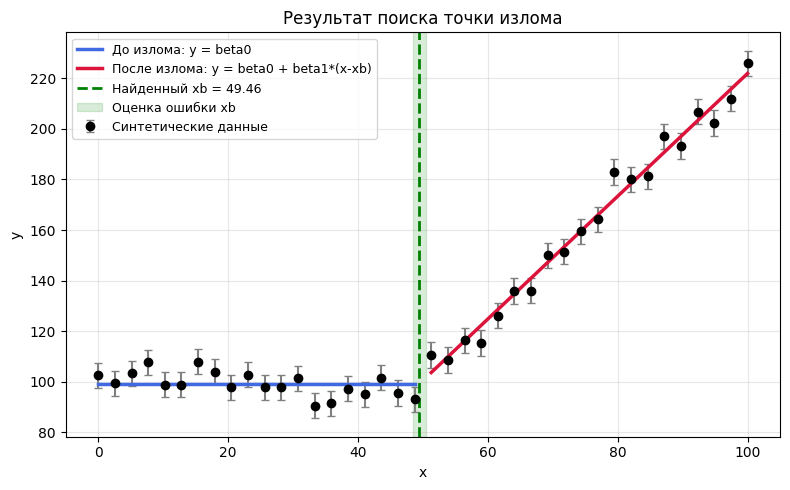
Часто можно столкнуться с задачей поиска точки, где кривая резко меняет характер зависимости. Здесь мы будем рассматривать переход от плато к линейной зависимости (см. рис. ниже). Обобщение на более высокие порядки зависимости не требует много усилий. Для решения будем использовать классический метод наименьших квадратов. Кроме этого, мы покажем, как учесть ошибки данных и как оценить ошибку на саму точку излома.
Пусть \(\x_n\), где \(n = 0, 1, 2, \ldots, N-1\) — данные, а \(\sigma_n\) — их ошибки. Используемая модель излома: слева от точки излома \(x_b\) модель является константой \(\beta_0\), а справа — линейной с параметрами \(\beta_1\) и \(\beta_0\):
\[ y(x) = \begin{cases} \beta_0, & x < x_b, \\[4pt] \beta_0 + \beta_1 (x - x_b), & x \ge x_b . \end{cases} \]
Точка излома \(x_b\) находится минимизацией функции \(\chi^2(x_b, \beta_0, \beta_1)\):
\[ \chi^2(x_b, \beta_0, \beta_1) = \sum_{x_i < x_b} \frac{(y_i - \beta_0)^2}{\sigma_i^2} + \sum_{x_i \ge x_b} \frac{[y_i - \beta_0 - \beta_1(x_i - x_b)]^2}{\sigma_i^2}. \qquad (1) \]
Ниже мы сделаем аналитически минимизацию по параметрам \(\beta_0\), \(\beta_1\) и найдём ошибку на точку излома; минимизация по параметру \(x_b\) выполняется численно.
Для решения нам понадобится элементы матрицы вторых производных (матрица Гессе), которая имеет вид:
\[ H = \begin{pmatrix} \frac{\partial^2 \chi^2}{\partial x_b^2} & \frac{\partial^2 \chi^2}{\partial x_b \partial \beta_0} & \frac{\partial^2 \chi^2}{\partial x_b \partial \beta_1} \\[8pt] \frac{\partial^2 \chi^2}{\partial \beta_0 \partial x_b} & \frac{\partial^2 \chi^2}{\partial \beta_0^2} & \frac{\partial^2 \chi^2}{\partial \beta_0 \partial \beta_1} \\[8pt] \frac{\partial^2 \chi^2}{\partial \beta_1 \partial x_b} & \frac{\partial^2 \chi^2}{\partial \beta_1 \partial \beta_0} & \frac{\partial^2 \chi^2}{\partial \beta_1^2} \end{pmatrix} \equiv \begin{pmatrix} m_{00} & m_{01} & m_{02} \\[4pt] m_{10} & m_{11} & m_{12} \\[4pt] m_{20} & m_{21} & m_{22} \end{pmatrix}. \]
Оценка параметров \(\beta_0\) и \(\beta_1\).
Сперва мы можем выполнить минимизацию по параметрам \(\beta_0\) и \(\beta_1\), используя нормальные уравнения метода наименьших квадратов:
\[ (X^T W X) \hat{\beta} = X^T W y. \qquad (2) \]
где матрицы имеют следующий вид:
\[ X = \begin{pmatrix} 1 & x_1 - x_b \\[4pt] 1 & x_2 - x_b \\[4pt] \vdots & \vdots \\[4pt] 1 & x_n - x_b \end{pmatrix}, \]
матрица весов:
\[ W = \operatorname{diag}\left(\frac{1}{\sigma_1^2}, \frac{1}{\sigma_2^2}, \ldots, \frac{1}{\sigma_n^2}\right). \]
Если рассмотреть подробнее, левые и правые части нормальных уравнений (2) имеют вид:
\[ X^T W X = \begin{pmatrix} \sum w_i & \sum w_i (x_i - x_b) \\[4pt] \sum w_i (x_i - x_b) & \sum w_i (x_i - x_b)^2 \end{pmatrix} = \begin{pmatrix} m_{11} & m_{12} \\[4pt] m_{12} & m_{22} \end{pmatrix} \equiv M_{\beta\beta}, \]
\[ X^T W y = \begin{pmatrix} \sum w_i y_i \\[4pt] \sum w_i y_i (x_i - x_b) \end{pmatrix} \equiv \begin{pmatrix} b_1 \\[4pt] b_2 \end{pmatrix}. \]
Решение уравнений можно получить с помощью правила Крамера. Определитель:
\[ \det(M_{\beta\beta}) = m_{11} m_{22} - m_{12}^2. \]
и искомые оценки параметров равны:
\[ \beta_0 = \frac{m_{22} b_1 - m_{12} b_2}{\det(M_{\beta\beta})}, \qquad \beta_1 = \frac{m_{11} b_2 - m_{12} b_1}{\det(M_{\beta\beta})}. \]
Ошибка на точку излома
Чтобы оценить ошибку на параметр \(x_b\), рассматривается ковариационная матрица \(V = H^{-1}\), дисперсия точки излома определяется элементом \(\sigma_{x_b}^2 = (H^{-1})_{00}\).
Используя дополнение Шура, можно получить явное выражение:
\[ \sigma_{x_b}^2 = (H^{-1})_{00} = S^{-1} = \left(m_{00} - m_{0\beta}^T H_{\beta\beta}^{-1} m_{0\beta} \right)^{-1}, \]
\[ \sigma_{x_b}^2 = \left( m_{00} - \begin{bmatrix} m_{01} & m_{02} \end{bmatrix} \begin{bmatrix} m_{11} & m_{12} \\[4pt] m_{12} & m_{22} \end{bmatrix}^{-1} \begin{bmatrix} m_{01} \\[4pt] m_{02} \end{bmatrix} \right)^{-1}. \qquad (3) \]
В развёрнутом виде:
\[ \sigma_{x_b}^2 = \left( m_{00} - \frac{ m_{01}(m_{02}m_{12} - m_{01}m_{22}) + m_{02}(m_{01}m_{12} - m_{02}m_{11}) }{ \det(M_{\beta\beta}) } \right)^{-1}. \]
На данном этапе мы сделали минимизацию по \(\beta_1\), \(\beta_0\). Последний шаг — выполнить минимизацию по \(x_b\) и оценить её ошибку, что выполняется численно. Реализацию данного алгоритма на Python можно найти в репозитории GitHub: github.com/fedsvir/break_point.git.